
路径规划算法可视化项目,简直炫酷!

大家好。
路径规划算法不知道大家了解么?比如大家可能比较熟悉的 Dijkstra 算法、A* 算法等,可能你没听过。但是这一类算法在我们的日常生活中的应用真的非常的广,比如扫地机器人,它按什么样的路径去打扫整个房间,可以理解就是使用了一套路径规划的算法。
通常路径规划算法都要在起点向外去不断探索,来最终确定走向终点的路径。而根据不同的策略就会有不同的算法,而类似的算法通过动态展示的方式,能够更加直观的对其了解。
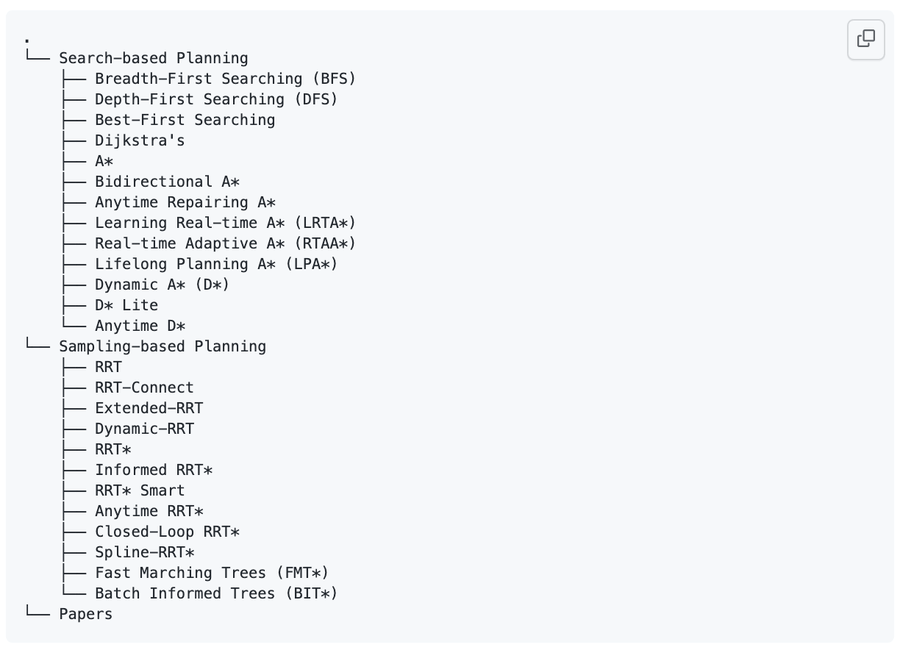
今天要推荐的一个开源项目 PathPlanning,就是将不同的路径规划算法进行动态化的展示。目前项目中有超过 20+ 算法,列表如下:
一起来看看我们刚才提到过的算法可视化效果:Dijkstra 算法和 A* 算法。
PathPlanning 项目我认为有非常大的教学价值,对希望了解路径规划算法的同学有非常大的帮助。更多项目详情请查看如下链接。
开源项目地址:https://github.com/zhm-real/PathPlanning
更多精彩请扫码关注如下公众号。
Written on October 31, 2021